
Usually, design engineers either source motion control components as complete self-contained units, or build their own in-house. But designing motor drives and motion control components from scratch requires detailed application knowledge about handling electric motors. Experience in implementing a range of technologies – such as motor control loops, reading position sensors, and connection to various bus and communication interfaces – is often required. Since the core competencies of device manufacturers and system integrators that integrate electric drives into their products are typically on a much higher abstraction level, the decision to build its own may drain attention and energies away from a company’s core development tasks.
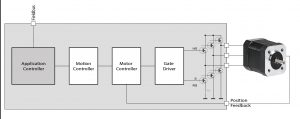
Figure 1: Components of a motor drive include: motor with position sensor, power stage with gate
driver, motor and motion controller, and application controller with optional Fieldbus interface.
Another alternative is to purchase motor drives that are self-contained hardware and software building blocks, which can be integrated into products without the need for detailed knowledge of motor control. This article will compare the tradeoffs in integrating motor drives into motion control applications as complete purchased units or as separate building blocks, vs. building them in-house. It will discuss different types of architecture and features of purchased drives and building blocks, and why these are important.
Why build your own? Advantages in developing servo drives internally
A company might decide to build its own servo drives in-house for several reasons. Most of them reflect both the complexities of how each drive design must fit a specific application, and the limitations of many existing off-the-shelf drive solutions.
Design engineers usually have a very specific list of requirements for their motor drives in an application, including size, costs, functionality, performance, and power. Finding a commercial device that matches everything on the list exactly can be difficult. Commercial products may not be a good fit because of physical size, form factor, or problems related to mechanical integration. Or they may not meet the required technical specifications, such as voltage and power levels.
Even if engineers do find the right product, it may not be available when needed to fit a specific production window, or for a price that fits the product’s target costs. Often, they must trade off some features and specifications to get all the options they need.
Developing servo drives in-house usually means engineers can create a device that meets all their specifications. Other reasons are the ability to redesign older hardware to refurbish a product, and a desire to be more independent of outside suppliers for better product lifecycle management. A major reason for building vs buying is when a company wants to use its own motion planning, ramping, or positioning functions. For example, a product may need a very fast and easy to synchronize interface, like the step/direction interface in a multi-axis motion control device. If this interface is not available in a commercial device, building your own device is often the only option.
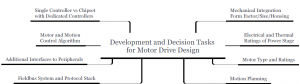
Figure 2: The development and decision tasks a design engineer must consider
when designing a motor drive.
Translating digital data into physical motion can be very difficult. If support for a key interface or motion mode is not provided by a commercial drive, additional software layers may be needed. These translating functions take some time to develop and integrate. Worse, additional communication layers introduce latency, which degrades control system performance in the field, and makes everything more complicated for engineering during product development. Whether the interface is simple, such as SPI (serial peripheral interface) or UART, or more complex, such as CAN (controller area network) or RS-485, engineers should start with a demo device or an evaluation kit in hand before they can estimate integration time.
Main development tasks and problems
Companies developing their own motor drives in-house must accomplish a long list of tasks that take up extensive development time and are accompanied by downsides.
First engineers must select a microcontroller from the hundreds available. It must be cheap enough, and possess the minimum computation power for the application, besides the right package, pin options, voltage levels, and many other features. This is a daunting task due to the volume of choices alone. Also, since new versions are released every couple of years from a given supplier, this can force companies to reduce industrial product development cycles to shorter than they may want.
Next, engineers must select and implement a motor control algorithm, which requires a motor and motion control expert. This not only raises R&D headcount, these experts are usually hard to find, creating a problem for the human resources department.
Engineers must select components and create electronic circuitry for the power stage, comprising the gate driver and MOSFETs. They must take care of mechanical integration, choosing the right connectors and power supply. They must also design the obligatory PCB (printed circuit board) schematics and layout, including designing current measurement and additional analog circuitry.
After these hurdles are overcome, R&D must ensure the design is compliant to specific standards or certifications, such as safety requirements for medical equipment. They may also need to ensure the product’s compatibility with legacy equipment, which might mean issues with the availability of older parts.
Besides these general tasks, engineers must select one or more sensors for motor control, and interface them to the motor drive. They also must choose a communications interface, like EtherCAT, to a command-level controller, such as a PLC (programmable logic controller) or an industrial PC.
Why buy? Advantages in purchasing highly integrated microsystems
Design engineers have many different options during the specification process of a new motor drive solution. Modern microsystems are available that concentrate motor control and interface functions into easy-to-use building blocks. These come in several forms: preconfigured microcontrollers, which implement motor control functions in software; multi-core microcontrollers with motor and motion control functionality; and other solutions that integrate a bus system driver and a corresponding software stack.
All these solutions contrast with complete drive solutions, which also integrate the power stage and measurement circuitry in a complete module. These complete drive solutions are the most inflexible ones and low in development cost, as design engineers only have to integrate them into the system. In addition, they often contain functions and features that aren’t needed, but still must be paid for. Although designing a motor drive in-house tends to be high in development costs, it’s usually more efficient from a manufacturing cost perspective. That’s because typically tooling costs are low and the main additional cost is prototyping, usually counted as a development cost.
A balanced approach between make and buy is offered by highly integrated microsystems. These integrate not only motor and motion control functionality, as well as a command-level interface like CAN or EtherCAT, but also integrate parts of the power stage like the gate driver. With these systems, engineers do not need to design these critical functions, yet keep the needed flexibility. These solutions also speed up the design process by using evaluation kits and standard modules, as well as making use of standard APIs (application programming interfaces), which were carefully developed by motion control experts and are easy to implement. Hardware design engineers still have the flexibility to match the power stage to their needs and thereby adjust form factor and size of the drive.
Conclusion
When developing a motor drive under the usual cost and time restrictions, design engineers can make use of highly integrated motion control microsystems. These offer not only access to advanced motion control expertise and functionality that engineers may not possess, but they also enable fast, lean, and easy design.
