

For fully autonomous driving to become reality, several technologies will have to reach maturity and be rolled out in concert. One of them is affordable, scalable, and reliable high precision positioning.
The past decades have seen substantial improvements in the performance of Global Navigation Satellite System (GNSS) technology. In the early 2000s, the time it took to get a first accurate position went from minutes to under thirty seconds. In the latter half of the decade, receiver sensitivity improved dramatically – from -130 dBm to -167 dBm. By 2015, the number of functional positioning satellite constellations had gone from one global constellation in 2000 (the USA’s GPS) to four (GPS, Russia’s GLONASS, China’s BeiDou, and the European Union’s Galileo), which are complemented by two regional systems (India’s NAVIC and Japan’s QZSS). This opened the doors to multi-constellation GNSS receivers. The satellite signals, too, have been modernized, and as of 2018, multi-band GNSS will become affordable. These advances set the stage for the next big theme in GNSS: achieving decimeter- or centimeter-level accuracy.
GNSS receivers triangulate their position using their distance from at least four GNSS satellites. Because they measure this distance based on the time it takes a satellite signal to reach them, even the slightest errors – down to a few billionths of a second – can negatively impact accuracy. Errors in satellite orbit position can lead to around 2.5 meters’ loss of accuracy. Satellites clock errors can add another 1.5 meters. And perturbations in the troposphere and the ionosphere can add another one and five meters respectively – even more if the satellite is close to the horizon or during periods of intense solar activity. By far the largest error is caused by multipath effects, in which satellite signals reach the receiver on multiple or indirect trajectories, for example by bouncing off building walls in urban canyons. In open sky conditions, standard accuracy GNSS receivers are accurate to within about two meters.
High precision GNSS systems dramatically improve precision using GNSS correction data to cancel out GNSS errors. One way to obtain this data involves monitoring GNSS signals from a base station at a known location. Deviations from the base station’s position are observed and sent to a rover – a manned or unmanned vehicle equipped with a GNSS receiver – allowing it to obtain a more accurate position reading. In favorable conditions, this approach can be used to achieve centimeter-level accuracy, provided that the base station and the rover are not too far apart.
Alas, not all GNSS errors can be eliminated using such an approach. Because the satellite signals that reach the base stations are subject to many of the same errors as those that reach the rovers, correction data can be used to eliminate satellite position and clock errors as well as atmospheric errors. Multipath errors, which are caused by the local surroundings of the rover, for example by nearby high-rises, must however be addressed by the receiver itself.
High precision GNSS isn’t new. Surveyors and other professionals have had access to the technology for decades. But high device cost and dependence on expensive correction services have prevented the technology from expanding out of this niche market. What is new is that we now have technologies that make high precision GNSS attractive to the mass market, enabling applications such as lane accurate navigation, augmented reality, aerial drone precision flights and landing, unmanned lawnmowers and tractors, and vehicle-to-everything (V2X) communication in which connected vehicles communicate wirelessly with other vehicles and infrastructure for collision avoidance. Many more applications will undoubtedly emerge as the technology takes hold.
Bringing high precision positioning to the mass market
There are two ways in which correction service providers can transmit GNSS error data to rovers; only one of them can be scaled up to meet the needs of the mass market. In observation space representation (OSR)-based approaches, the first of the two, correction service providers compute the expected observed errors at the location of each individual rover and transmit this information to them wirelessly. Conversely, in approaches based on state space representation (SSR), observed GNSS signal errors are used to physically model the errors across an entire region as a state space model. The parameters describing the state space model at any given time are then broadcast to rovers across the modeled region.
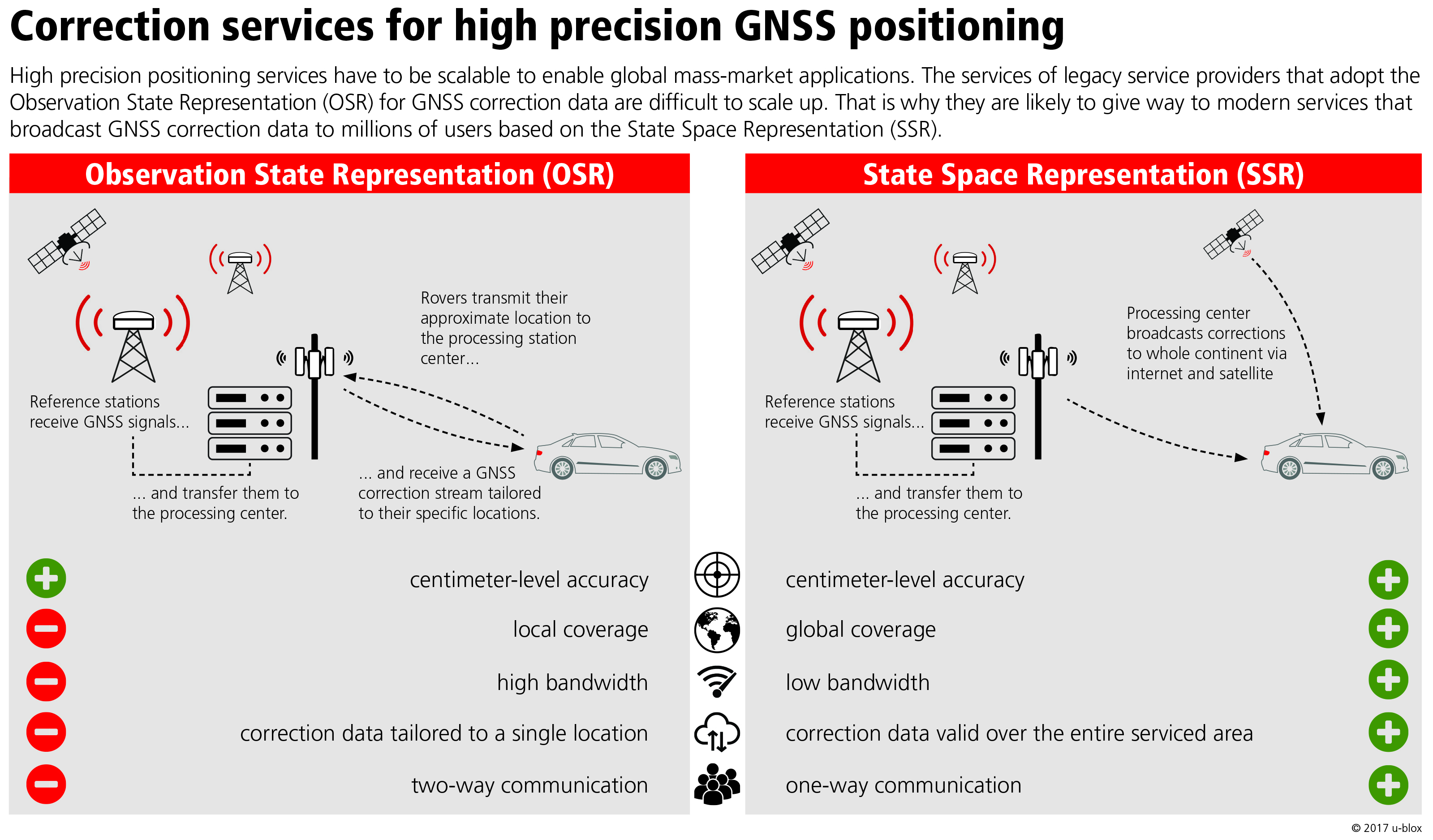
Image 1: Observation space representation (OSR) versus state space representation (SSR)
OSR is adopted by real time kinematic (RTK) and network RTK satellite navigation, which are used today in settings requiring centimeter-level or even millimeter-level positioning accuracy. These approaches are accurate when the base station and the rover are within 30 kilometers distance of each other. OSR-based approaches require two-way communication between the rover and the correction service provider. Because mobile communication networks would hardly be able to reliably sustain this level of communication were it to be adopted en masse, this makes them poorly adapted for mass market applications. SSR-based approaches get around this by broadcasting a single stream of correction data for the entire serviced area to all rovers. This simplified communication and the fact that it can deliver robust service at a relatively low reference station density (150-250 kilometers) makes it the only feasible approach for mass market applications such as highly assisted driving.
Improved performance will also come from advanced receiver hardware capable of receiving more information from the satellites. While the first generation of GNSS satellites only transmitted its signals in a single frequency band, today’s modern navigation satellite systems send out their signals in up to three separate bands. The American GPS system, for instance, transmits in the L1, L2, and L5 bands, centered on 1575 MHz, 1227 MHz, and 1176 MHz respectively. Russia’s GLONASS transmits only in the L1 and L2 bands, as does China’s BeiDou. High precision GNSS receivers can take advantage of multiple frequency bands from a single constellation to massively reduce the time it takes to achieve high precision. The result is a markedly more robust positioning performance and ultimately, a more reliable service for the user.
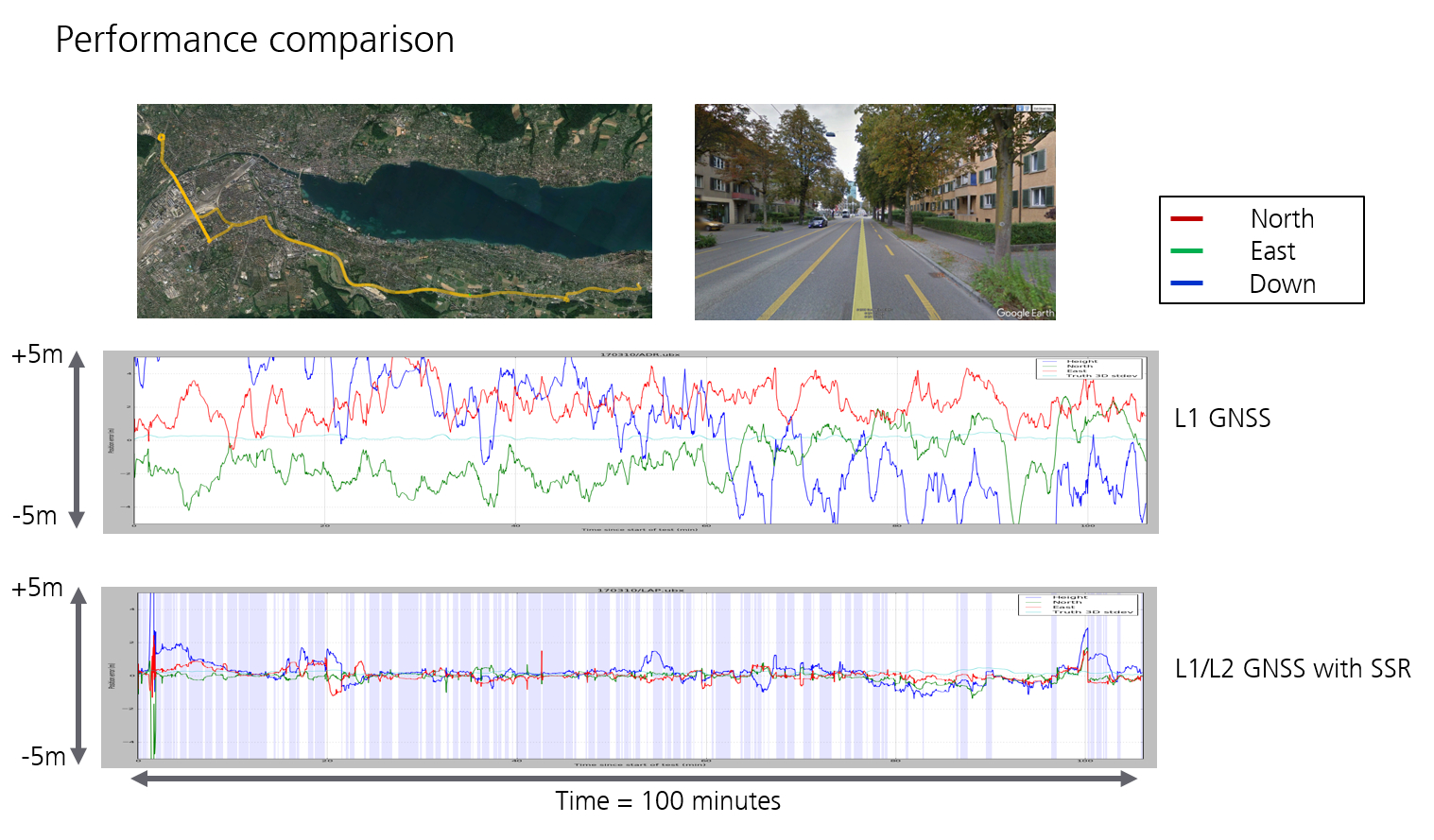
Figure 2: Performance comparison between single band GNSS and dual band GNSS with SSR correction data
Future high precision GNSS systems will be composed of multiple elements, of which the GNSS constellations currently in orbit are the most obvious. On the ground, GNSS reference stations will monitor GNSS signal errors in real-time. Adopting the SSR approach, correction services will then broadcast the error components over the Internet as well as via geostationary satellites. In addition being fitted with a dual-band GNSS receiver, rovers will be equipped with a cellular modem to receive the correction stream broadcast over the Internet and an L-band receiver to pick up the satellite correction stream.
High precision positioning for autonomous driving
While today’s vehicle fleet continues to be dominated by vehicles that are entirely controlled by their driver, an increasing number of them offer at least some assisted driving capabilities. Moving towards fully autonomous driving will require incrementally increasing the level of automation in special use cases, such as on highways or for parking. Whereas today, drivers may benefit from assisted driving (Level 1 in the figure below), they are still required to carry out all lane holding and lane change maneuvers. Some cars on the roads today are already in Level 2, with partly automated systems that carry out these actions autonomously in special application cases. In highly automated driving (Level 3), drivers will be able to let go of the wheel in special application cases but will have to be prepared to take over if necessary. Fully automated driving (Level 4) will no longer necessitate the driver – albeit still in special use cases. Only when these levels are cleared will we be able to extend the applicability of driverless vehicles to all use cases (Level 5).
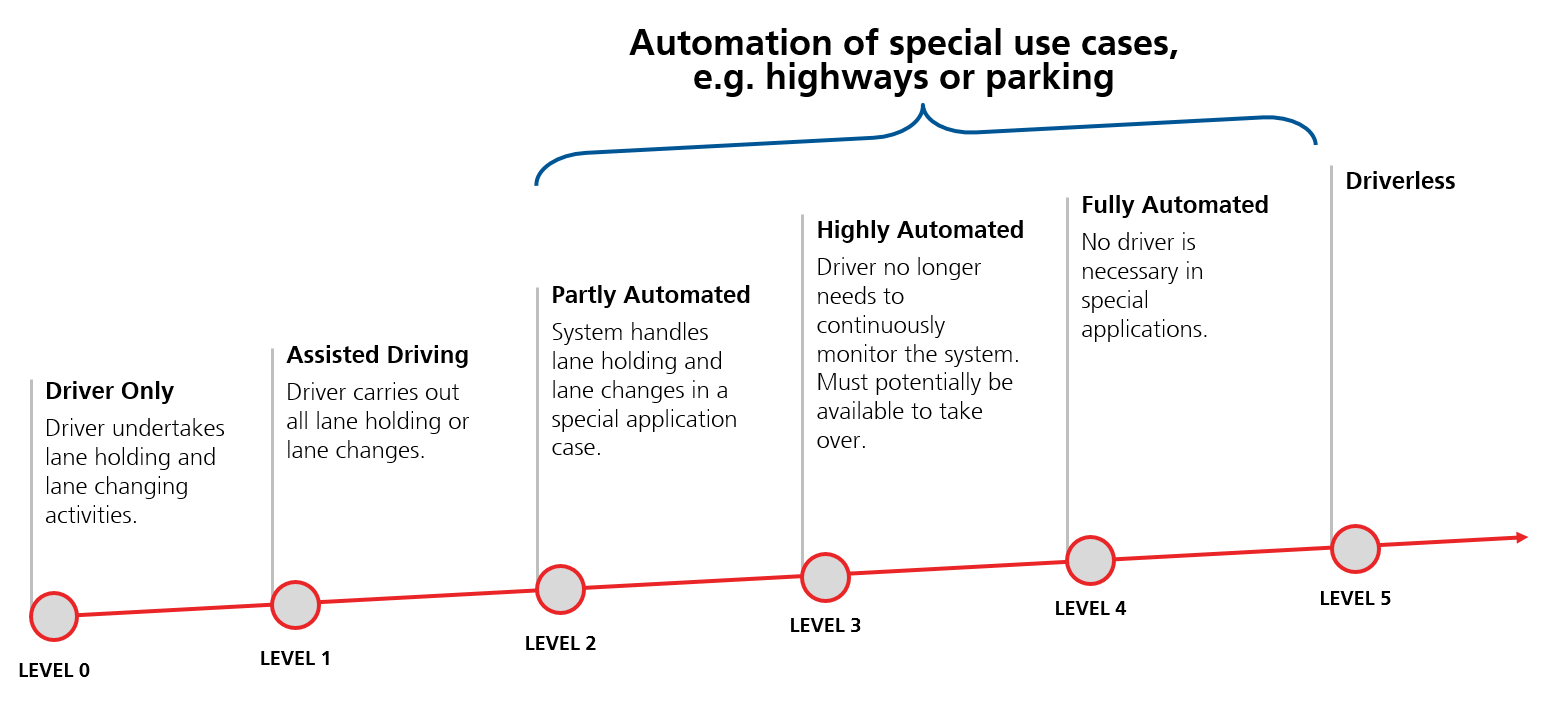
Image 3: Roadmap to autonomous driving
A combination of technologies will be needed to meet safety requirements for autonomous driving. Combining camera images and lidar and radar data with high definition maps already allows vehicles to position themselves on the map with high (roughly 10-centimeter) accuracy and detect obstacles in many use conditions. That said, these systems alone are not safe enough to make the driver obsolete. During the transition towards fully automated driving, a vehicle’s precise position will determine whether autonomous driving mode can be switched on. Poor environmental conditions or an absence of distinguishing landmarks could cause optical systems to fail to correctly determine the use case – a challenging situation in Level 4 systems, in which the driver can fully relinquish control over the vehicle in certain situations.
It is in these situations that high precision GNSS combined with automotive dead reckoning – which blends satellite navigation data with individual wheel speed, gyroscope and accelerometer information to deliver accurate positioning in the absence of GNSS — can step in as a fully independant source of position. The precise position that it delivers would not only help identify the correct segment of high definition maps and geo-fence critical areas, for example to reduce speed, it could also be used to calibrate the vehicle’s sensors. Only with such a system in place does it become possible to meet of safety requirements for autonomous vehicles laid out in ISO 26262. These include functional safety, the capacity of the vehicle to safely respond to errors, be it at the firmware or hardware level, while keeping passengers safe.
Functional safety is a prerequisite for safe autonomous vehicles. It is, however, by no means sufficient. Functional safety is car-centric in that it deals with errors that might occur on the vehicle. For positioning, the main error sources – satellite clock and position, multipath effects or potential glitches in the correction stream – are external to the vehicle. A functionally safe vehicle would therefore see no reason to reject flawed data. Accounting for such external errors requires a more holistic approach, which could be called “integrity.” As opposed to functional safety, integrity would deal with the entire technology chain from a holistic perspective, encompassing the various sensors, the V2X infrastructure, and security systems at all levels. It requires that all technologies, including GNSS, provide a measure of confidence in their output in order to warn when an alternative technology should be used in its place.
The path to high GNSS accuracy is key to enabling advanced driver-assistance systems (ADAS) and fully autonomous driving in a way that increases road safety. As an independent source of positioning information, high precision GNSS – enabled using multiband receivers and SSR correction data – will reliably deliver a guaranteed position of the vehicle, regardless of the circumstance. Ultimately, it will have to be accurate to the decimeter level on open highways, and to the sub-meter level on more challenging urban highways, ensuring that the reported position is not only accurate, but that is so to an extremely high probability. And for it to be taken up in high volumes by the market, it will have to be both qualitatively irreproachable and affordable.
u-blox embarked on the path to high precision GNSS in 2016 with the launch of NEO-M8P, by far the smallest and lowest power RTK receiver on the market. In 2017, it announced Sapcorda, a joint venture with Bosch, Mitsubishi Electric, and Geo++, to bring a global and affordable GNSS correction service that is compatible with mass market applications. And in February, 2018, it announced the new u‑blox F9 technology platform delivering versatile high precision positioning technology for industrial and automotive applications. Going forward, u-blox is committed to filling the gaps that stand in the way of enabling highly and fully autonomous systems, in particular automated driving.





